

Robots in the AuRoRA project
 The robots can be used to teach the children basic social interaction skills using turn-taking, imitation games, collaborative skills, emotional expressions and others. The use of robots as mediators, as objects of shared attention can further encourage interaction with peers and adults. The robots that have been used in the project are as follows:
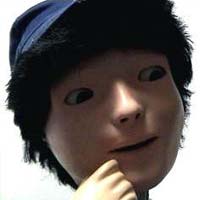
The robots can be used to teach the children basic social interaction skills using turn-taking, imitation games, collaborative skills, emotional expressions and others. The use of robots as mediators, as objects of shared attention can further encourage interaction with peers and adults. The robots that have been used in the project are as follows: Kaspar is a child-sized humanoid robot developed by the Adaptive Systems Research Group at the University of Hertfordshire. The first version was built in 2005. The robot has been used in different projects on developmental and cognitive robotics. However, very encouraging results have been obtained in research that focuses on its use in robot-assisted therapy for children with autism in a series of case studies with dozens of children. Ben Robins has explored the role of the robot as a social mediator encouraging interaction with other children and adults and developed the mechanism for the robot to be used at the hand of therapists and/or teachers. The robot has also used in several studies trying to encourage collaboration among children with autism as part of Josh Wainer’s PhD research (A demo video can be seen here). As part of the IROMEC project Ben Robins and Ester Ferrari studies play scenarios of children with autism and KASPAR. In the FP7 European project ROBOSKIN (2009-2012) Ben Robins has used KASPAR to helped develop cognitive mechanisms that use tactile feedback to improve human-robot interaction capabilities in the application domain of robot assisted play for children with autism. Sandra Costa has used KASPAR to teach children with autism about body parts (Costa etal 2013)).as part of a collaboration with University of Minho, Portugal. Recently, Luke Wood has used KASPAR in robot-mediated interviews for neurotypical children (Wood etal. 2013, a research direction towards using robots as interviewers to be used by social services or police. The latest work of KASPAR and Children with autism can be seen here.
Kaspar is a child-sized humanoid robot developed by the Adaptive Systems Research Group at the University of Hertfordshire. The first version was built in 2005. The robot has been used in different projects on developmental and cognitive robotics. However, very encouraging results have been obtained in research that focuses on its use in robot-assisted therapy for children with autism in a series of case studies with dozens of children. Ben Robins has explored the role of the robot as a social mediator encouraging interaction with other children and adults and developed the mechanism for the robot to be used at the hand of therapists and/or teachers. The robot has also used in several studies trying to encourage collaboration among children with autism as part of Josh Wainer’s PhD research (A demo video can be seen here). As part of the IROMEC project Ben Robins and Ester Ferrari studies play scenarios of children with autism and KASPAR. In the FP7 European project ROBOSKIN (2009-2012) Ben Robins has used KASPAR to helped develop cognitive mechanisms that use tactile feedback to improve human-robot interaction capabilities in the application domain of robot assisted play for children with autism. Sandra Costa has used KASPAR to teach children with autism about body parts (Costa etal 2013)).as part of a collaboration with University of Minho, Portugal. Recently, Luke Wood has used KASPAR in robot-mediated interviews for neurotypical children (Wood etal. 2013, a research direction towards using robots as interviewers to be used by social services or police. The latest work of KASPAR and Children with autism can be seen here.
KASPAR has 8 degrees of freedom in the head and neck , 6 in the arms and hands and 1 in the torso.. The face is a silicon-rubber mask, which is supported on an aluminium frame. It has 2 DOF eyes fitted with video cameras, and a mouth capable of opening and smiling.















Provided by Aude Billard, EPFL, Lausanne, Switzerland.
Robota is a 45 cm high, humanoid robotic doll. The main body of the doll contains the electronic boards and the motors that drive the arms, legs and head giving 1 DOF to each. The robot has also the capability of being connected to various sensors such as infrared emitters/ receivers, light detectors and more. The robot has been used extensively by Ben Robins as part of his PhD research.
For more information on the doll robot see: Billard, A. (2003) Robota: Clever Toy and Educational Tool. Robotics & Autonomous Systems, 42, 259-269.


Pekee robot provided by Wany Robotics, France.
Pekee is an oval shaped with plastic casing robot with two motorized wheels, and freely rotating caster wheel. It has 15 infrared distance measurement sensors, and other optional sensors such as temperature, shock and light sensors. Pekee has been used primarily with typically developing children to explore basic features of child-robot interaction with a mobile robot. The robot was used as part of Tamie Salter’s PhD project.


Labo1 robot provided by Applied AI Systems, Canada.
This is a flat-topped robot buggy, 38cm long, by 30cm wide and 12cm in height to the top of the buggy, with 8 infrared sensors and optional heat sensors (21.5cm hight with the heat sensor). Each of the four wheels are independently driven, giving it smooth turning. This was the first robot used in the Aurora project as part of the PhD project of Iain Werry.
AIBO ERS-7 - Sony Corporation.
Aibo ERS-7 is a mobile robotic dog. It weights approximately 1.6kg with the following dimensions: 180 (w) * 278 (h) * 319 (d) mm. It has many different sensors (e.g. temperature, acceleration, electric static, pressure sensor, infrared, stereo microphones.). A wireless LAN connection can be established between the robot and a laptop, whereby the robot can notably send current states of its sensors every 32ms. The robot has been used extensively by Dorothée Francois as part of her PhD research. Dorothée developed an adaptive controller so that the AIBO could adapt to different play styles of children with autism. It was also used in a long-term study inspired by non-directive play therapy.
- Home

- Robots